Grant-in-Aid for Transformative Research Areas (A)

Information Science Group (A01)
A01-1 Integrated information processing models for sensory-motor learning
PIYuichi KatoriProfessor, Future University-HakodateLab.HP
Co-IRyosuke HosakaAssociate Professor, Shibaura Institute of TechnologyResearchmap
Co-INaoya FujiwaraAssociate Professor, Tohoku UniversityResearchmap
Co-IKeita TokudaAssociate Professor, Juntendo University, JapanResearchmap
Co-IHideyuki KatoAssociate Professor, Oita UniversityResearchmap
Goal
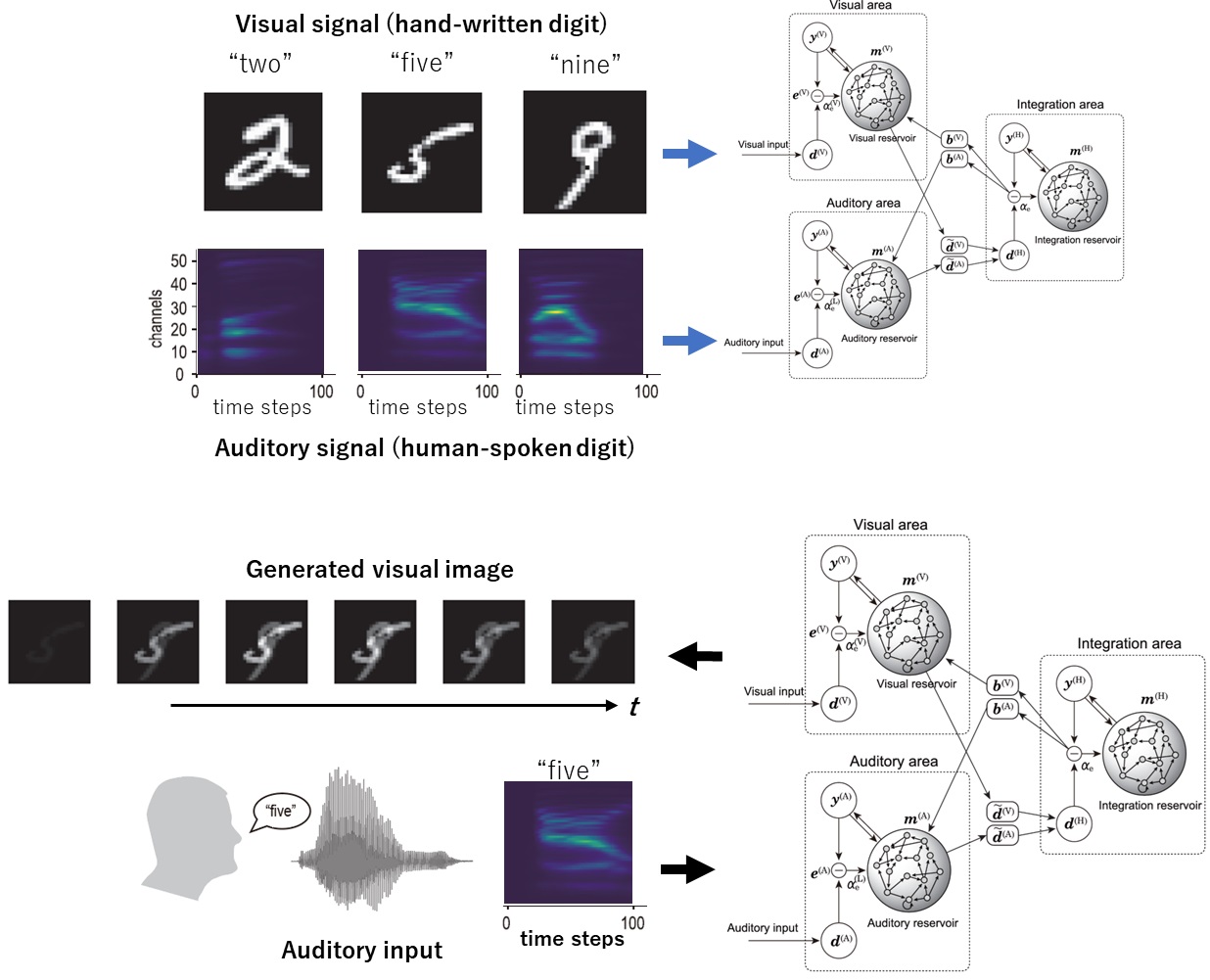
The goal is to construct an integrated information processing model for sensorimotor learning that incorporates the brain’s predictive coding and reward-modulated learning, based on the information processing mechanisms that utilize the complex neural dynamics arising from the large-scale interconnected systems of nonlinear elements, such as neurons.
Research plans
We aim to construct a sensorimotor learning model that incorporates knowledge of information representation and neural dynamics obtained from biological brain and nervous system data. This model will elucidate the functional role of spontaneous neural activity in motor control and the learning efficiency and environmental adaptability of online reward-modulated learning driven by neuromodulators like dopamine. Specifically, by integrating large-scale neural activity data from biological systems obtained by the A03 Masamizu group and A03 Kamiya group, and the analysis results from the A01 Matsui group through data-driven modeling, we will formulate an integrated information processing model (see diagram below). Furthermore, in collaboration with the A02 Yamamoto group, we will verify the biological validity of the integrated information processing model by implementing it on cultured neural circuits (① Multicellular Mathematical Model). Additionally, in collaboration with the A04 Kohno group and A04 Hirata group, we will implement the integrated information processing model into electronic devices (hardware) and demonstrate its superiority over existing adaptive control models through robotic applications that include sensor information processing and actuator control (② Multicellular Hardware).
A01-2 Large-scale neural data analysis of visual information processing and learning rules
PITeppei MatsuiProfessor, Doshisha UniversityResearchmap
Co-ISatoru KondoSpecially Appointed Associate Professor, The University of TokyoResearchmap
Co-IRuixiang LiSpecially Appointed Researcher, Doshisha UniversityResearchmap
Goal
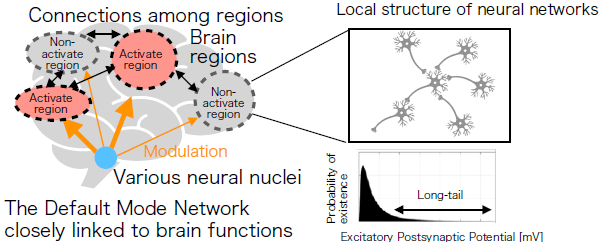
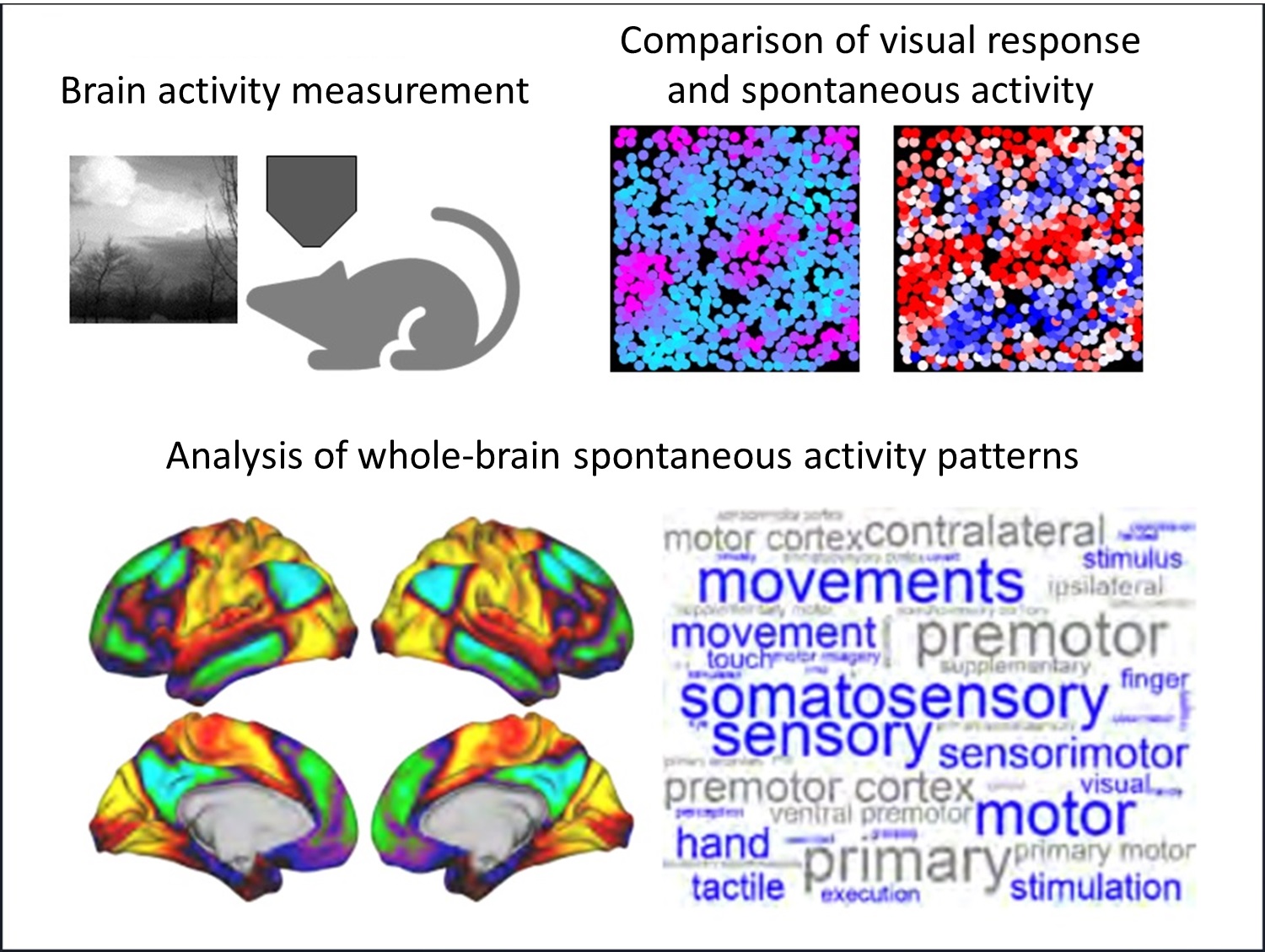
Focusing on the spontaneous activity of the visual cortex, we aim to elucidate its role in neural circuit formation, i.e., learning, and its function in visual information representation through biological experiments and statistical data analysis.
Research plans
In this research project, we will advance studies using mathematical analysis of large-scale brain activity data and experimental research using brain activity imaging, with a focus on spontaneous activity. Specifically: 1) elucidation and modeling of the functional significance of spontaneous activity in the cerebral cortex in visual information processing; 2) comparison between the functions of spontaneous activity predicted by mathematical models and the actual patterns of spontaneous activity in neural circuits; and 3) extraction of biological brain learning rules through synapse-level analysis and modeling. In collaboration with the group A03, we will elucidate the local interactions between neurons during development and learning through synapse-level functional analysis and morphological analysis. In collaboration with the group A02 and A04, we will model the results obtained from data analysis and experiments on biological brains using minimal systems such as cultured neural circuits and hardware.
A01-3a Continual learning by spontaneous synaptic plasticity
PITomoki KurikawaAssociate Professor, Future University-HakodateResearchmap
Goal
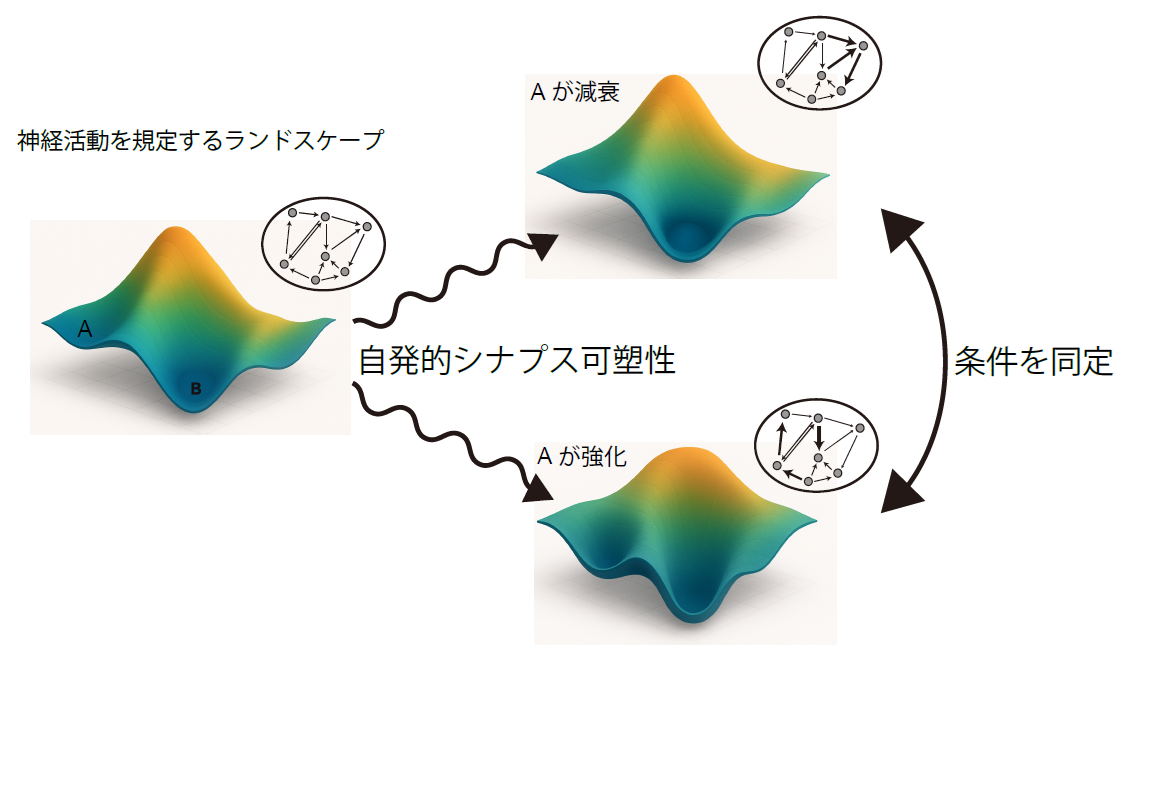
Achieve continuous learning by focusing on spontaneous neural activity and synaptic plasticity not found in machine learning.
Research plans
We aim to realize continuous learning, in which spontaneous neural activity and synaptic plasticity outside of task performance, which is unique to the nervous system, is used to retain past information while learning the next task. To this end, we use neural network models to identify the following conditions: 1. patterns embedded in neural network activity are reinforced by spontaneous plasticity. 2. spontaneous structure in which newly learned patterns are quickly embedded. Furthermore, we will formulate these conditions in a way that they can be verified in a culture system.
A01-3b TBA
PIKenji MoritaAssociate Professor, The University of TokyoResearchmap
Goal
TBA
Research plans
TBA

A01-3c Reservoir computing-based adaptation in body-control-environment coupled dynamical systems under unknown and perturbed conditions
PIYuji KawaiAssociate Professor, The University of OsakaResearchmap
Goal
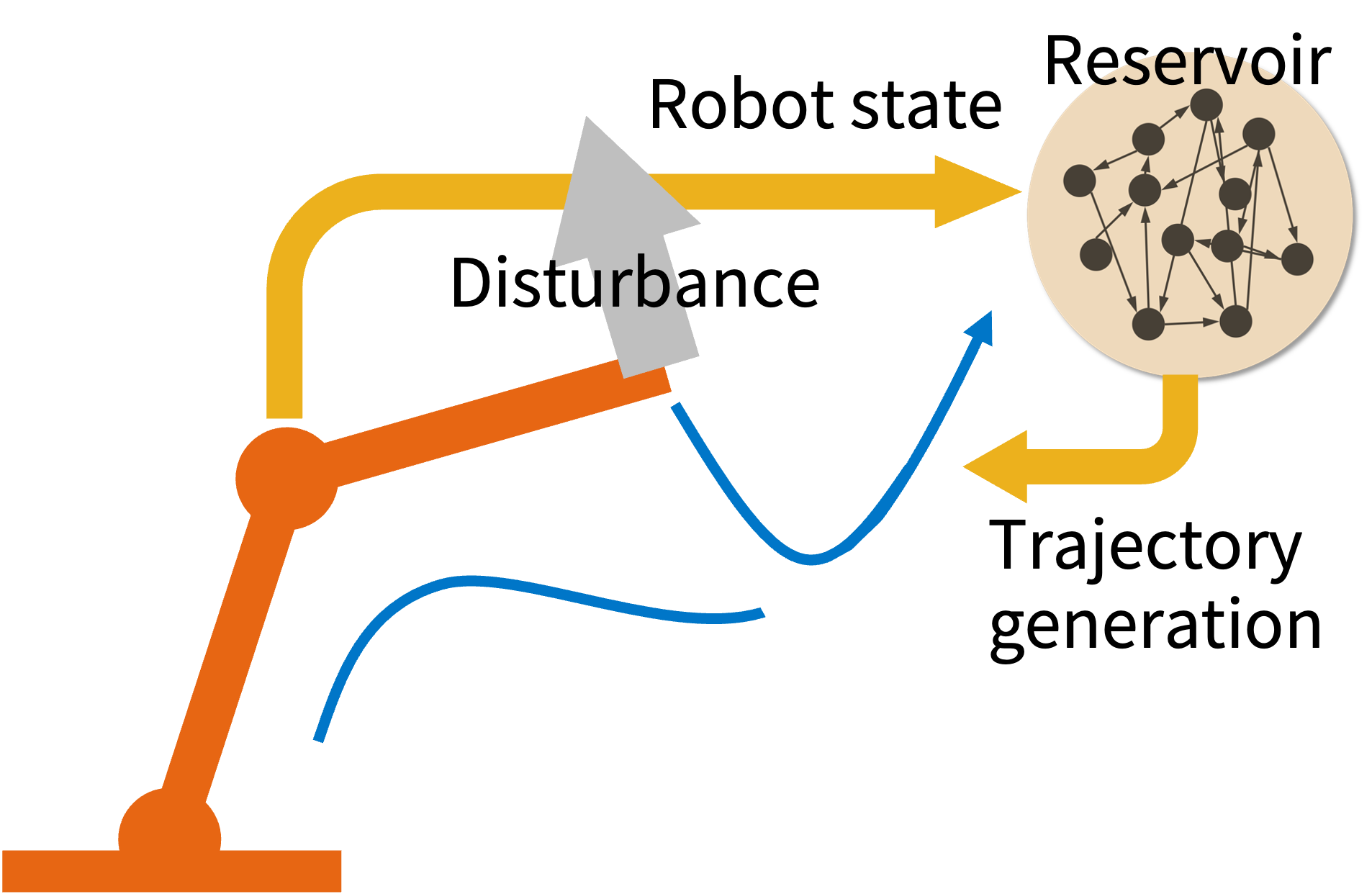
We aim to propose a model in which a reservoir computer learns the state vector field of a robot-considered as a coupled dynamical system of body, control, and environment-from a small number of target trajectory samples, and adaptively generates reference trajectories along the learned field at each time step. We will demonstrate that this approach enables robust robot control even in environments with external disturbances.
Research plans
We will implement a system that adaptively generates reference trajectories using reservoir computing on both simulated and real multi-link robots. In this system, the robot's state is represented by joint angles, and we will evaluate control signals and behavior under external disturbances, observation noise, and changes in the environment (e.g., direction of gravity). By comparing with conventional feedback control systems that rely on fixed reference trajectories, we will demonstrate the advantages of the proposed approach in terms of reduced control effort (e.g., torque generation) and faster recovery in response to disturbances. Furthermore, we will investigate whether the reservoir computing model can learn multiple target behaviors, such as periodic motions and reaching movements.
A01-3d Mechanisms of Emergent Human Brain Functions from Large-Scale EEG Data for Future Biological Supremacy Applications
PISou NobukawaProfessor, Chiba Institute of TechnologyResearchmap
CollabYoji HiranoProfessor, University of MiyazakiResearchmap
CollabShunsuke TamuraAssistant Professor, University of MiyazakiResearchmap
CollabYusuke SakemiPrincipal Researcher, Chiba Institute of TechnologyResearchmap
CollabYuji OkamotoProgram-Specific Assistant Professor, Kyoto UniversityResearchmap
Goal
The objective of this project is to identify the structural parameters and dynamic characteristics of neural networks related to the emergence of brain functions from human EEG data, utilizing the frameworks of Spiking Neural Networks (SNN) and Reservoir Computing (RC).
Research plans
1. We will analyze the dynamic properties of EEG data accumulated thus far, focusing on data collected primarily through the domestic multi-center clinical EEG consortium (Asian Consortium on EEG studies in Psychosis: ACEP). The goal is to identify features that distinguish healthy individuals from those with psychiatric disorders.
2. We will perform simulations using SNN to explore the parameter space of neural networks that can reproduce the dynamic characteristics of neural activity observed in the EEG data.
3. We will evaluate the neural network characteristics of healthy individuals and psychiatric patients using the framework of RC, aiming to elucidate the structural and dynamic properties of neural networks that support brain functionality.