Grant-in-Aid for Transformative Research Areas (A)

Hardware Applications Group (A04)
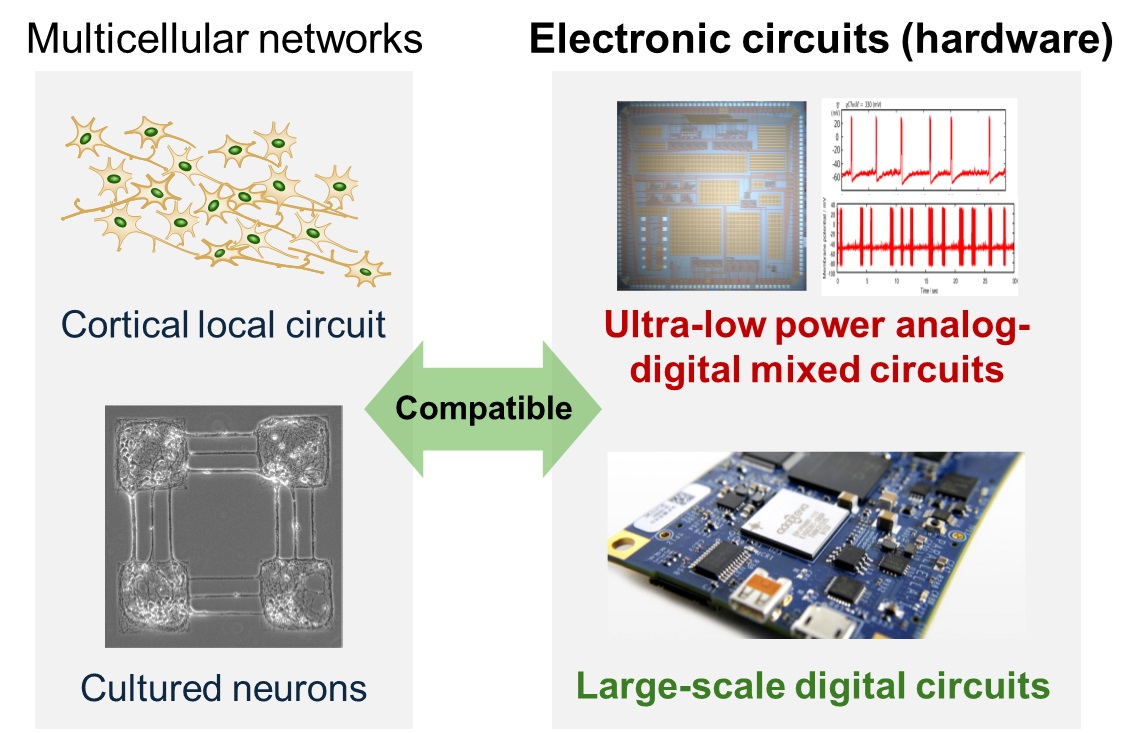
A04-1 Analog and digital circuit implementation of multicellular computation
PITakashi KohnoProfessor, The University of TokyoResearchmap
CollabMasaharu KobayashiAssociate Professor, The University of TokyoResearchmap
Goal
To efficiently implement Multicellular Neurobiocomputing in hardware, we are developing an analog-digital mixed-signal integrated circuit as a platform to realize an ultra-low-power circuit and prototype its function in digital circuits (figure).
Research plans
We implement the information processing of multicellular networks in electronic circuits at real-time (or faster) speeds, while achieving energy efficiency on par with biological tissues. This is realized based on a silicon neural network (SiNN), which consists of neuron circuits for emulating the electrical activity of nerve cells and synapse circuits for emulating synaptic transmission and plasticity. Although SiNN has attracted attention as a form of low-power hardware (neuromorphic hardware) for modern AI, current SiNN employs a highly simplified model specialized for processing tasks equivalent to those of artificial neural networks, making it incapable of reproducing the electrical activity of multicellular networks. In this research, we will enhance its biological plausibility by integrating the latest neuro findings in experimental neuroscience—including calcium-based plasticity models and the results of the A01 Matsui group and A03 Kamiya group—and develop SiNN circuits capable of replicating the functions of multicellular networks. In addition to the development and prototyping of analog SiNN circuits, we will also prototype multicellular networks on FPGA-based digital circuits. This approach will enable the implementation of the functional connectivity in cortical local circuits inferred by the A01 Matsui group, emulation of the artificial neuronal networks developed by the A02 Yamamoto group, and application to robot control by the A04 Hirata group.
A04-2 Robotic implementation and adaptive control based on bioplausible models
PIYutaka HirataProfessor, Chubu UniversityResearchmap
Co-IHirotsugu OkunoAssociate Professor, Osaka Institute of TechnologyResearchmap
Co-IShinsuke YasukawaAssociate Professor, Kyushu Institute of TechnologyResearchmap
Goal
We aim to implement a sensorimotor learning model, inspired by the biological brain, on an FPGA and use it as a controller for adaptive control in robotics. Through this, we will clarify the advantages and disadvantages compared to current control methods, while demonstrating and evaluating phenomena emerging from a multi-cellular information processing system with physical embodiment.
Research plans
Including models constructed by other teams in the field, we will implement a mathematical model that describes sensorimotor learning in multi-cellular systems on an FPGA capable of real-time operation. We will conduct experiments on robot control in the real world, focusing on motor output control in response to various sensory inputs. In particular, we will evaluate the process of adaptively acquiring predictive motor control, which is driven by spontaneous activity —one of the most prominent features of brain function in animals. In the latter half of the research period, in collaboration with other teams, we will establish an interface connecting cells and robots, and develop adaptive robot control technologies using artificial neural circuits as controllers. Through these efforts, we will elucidate various phenomena emerging from the interaction between an embodied multi-cellular bio-computation model and multi-sensory information in real-world.

and actual device control experiment scheme (bottom)
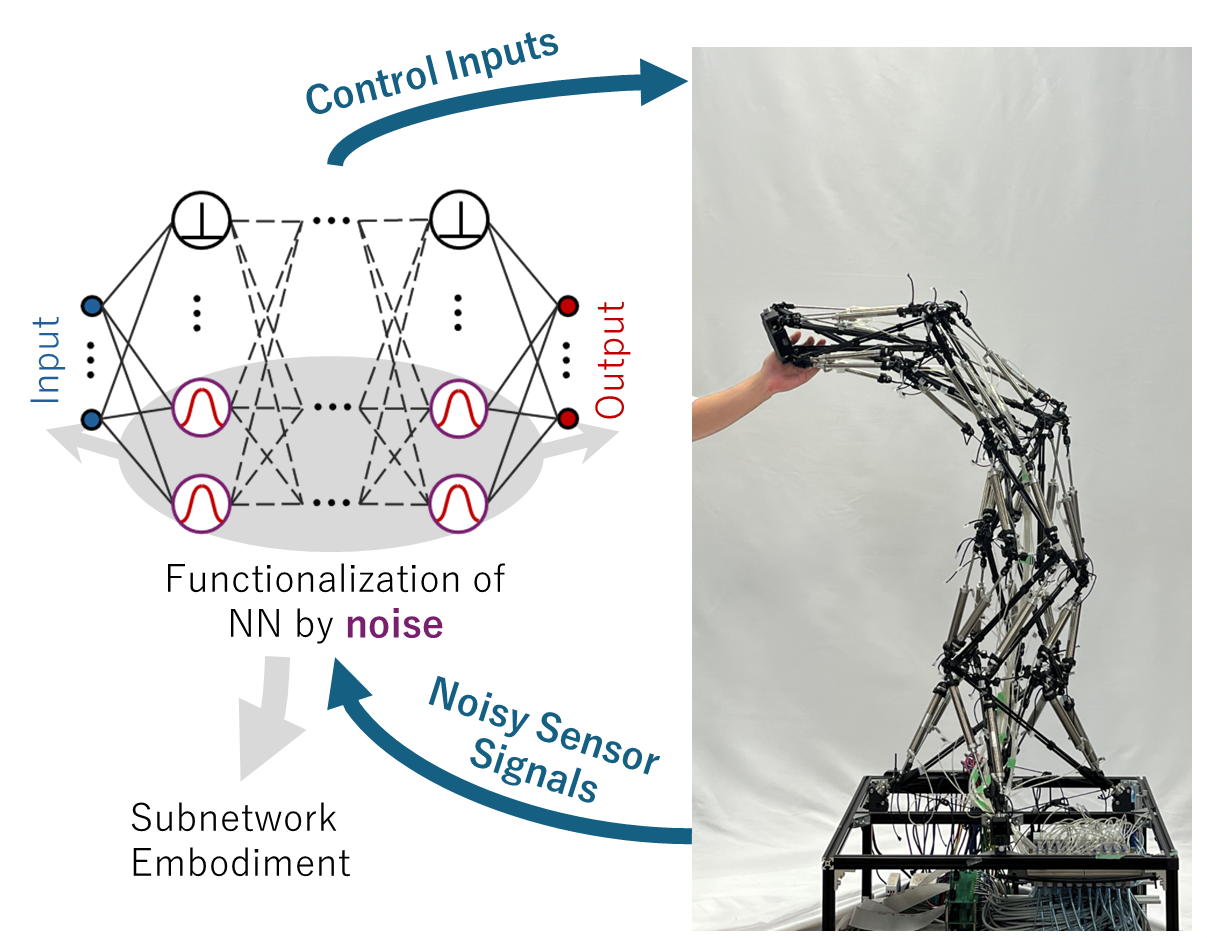
A04-3a Learning of Embodied Modules of Redundant Robots Using a Neuronal Network Functionalized by Noise
PIShuhei IkemotoAssociate Professor, Kyushu Institute of TechnologyResearchmap
Goal
By performing motor learning of redundant manipulators in the neural network, which enables learning and inference by adding noise, our goal is to show that noise dependent on the body part will self-organize to form a subnetwork related to the control of each body part.
Research plans
In general, neural network parameters have redundancy due to the order of units. Therefore, functional localization like human brain does not occur, and groups of nearby units do not necessarily have similar functions. In this study, we show that sensory signals and noise obtained from nearby body parts can be a natural bias for forming functional localization by using the neural network, which enables learning and inference by stochastic resonance, for the motor learning of redundant manipulators. We will use ROS 2, a middleware widely used in robot systems, to enable both the neural network and the redundant manipulator to be treated as nodes, thereby laying the foundation for this research and collaboration in this project. And then, we will demonstrate the validity of this working hypothesis by conducting simple motor learning such as reaching, and will also aim to expand the results through interdisciplinary collaboration in this project.
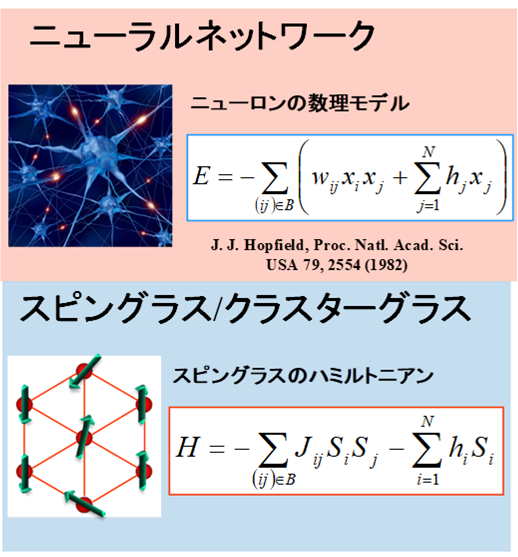
A04-3b Brain-morphic Information Processing Devices operated by Environment Thermal Energy Induced Stochastic Resonant Spin Waves
PIHitoshi TabataProfessor, The University of TokyoResearchmap
Goal
To develop a room-temperature-operable spin glass materials enabling low-energy (low-power consumption) operation, and to develop an environmentally induced stochastic resonant spin wave brain-morphic information processing device using these materials, toward the creation of innovative low energy consumption computing technologies.
Research plans
(1) Develop innovative low-power spin materials with excellent spin angular momentum (spin wave) propagation characteristics that enable information transmission and processing without electron transport and avoid Joule heat loss.
(2) Create room-temperature-operable spin fluctuation materials (spin glasses) that actively utilize “thermal fluctuations,” previously considered a nuisance, as an energy source from the environment by learning from biological fluctuations.
(3) Develop spin wave devices based on the principle of stochastic resonance triggered by environmental thermal fluctuations.
Through these efforts, we aim to develop “low-energy consumption brain morphic devices” that operate based on stochastic resonance induced by environmental thermal fluctuations, utilizing a paradigm shift inspired by biological functions.
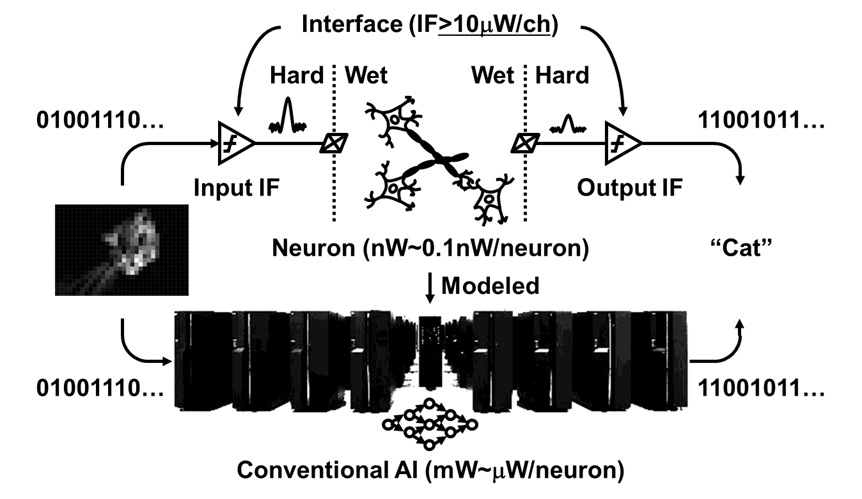
A04-3c Energy-Efficient Interface between Wet and Hardware Stack
PINoriyuki MiuraProfessor, The University of OsakaResearchmap
Goal
Developing an energy-efficient neuron interface connecting between an wetware of biological neural network and a hardware of silicon integrated circuits for realizing an energy-efficient hybridware with stacked wet and hardware.
Research plans
(1) Developing an energy-efficient neuron interface dedicated to insertion and detection of spikes as an effective form of representation in brain cell information processing networks. (2) Developing an efficient input/output layer digital signal processing scheme to realize information processing based on the spatiotemporal dynamics of brain cell networks accessible via the interface arrays. (3) Finally, by integrating (1-2) technologies into the stacked hybridware, we aim to demonstrate supremacy in terms of energy efficiency against existing brain-mimetic silicon artificial intelligence.