文部科学省 科学研究費助成事業 「学術変革領域研究(A)」


情報数理班(A01)
A01-1 マルチセルラ神経ダイナミクスのデータ解析基盤と情報処理モデル
代表香取 勇一公立はこだて未来大学 システム情報科学部 教授Lab.HP
分担保坂 亮介芝浦工業大学 システム理工学部 准教授Researchmap
分担藤原 直哉東北大学 情報科学研究科 准教授Researchmap
分担徳田 慶太順天堂大学 健康データサイエンス学部 講師Researchmap
分担加藤 秀行大分大学 理工学部 准教授Researchmap
達成目標
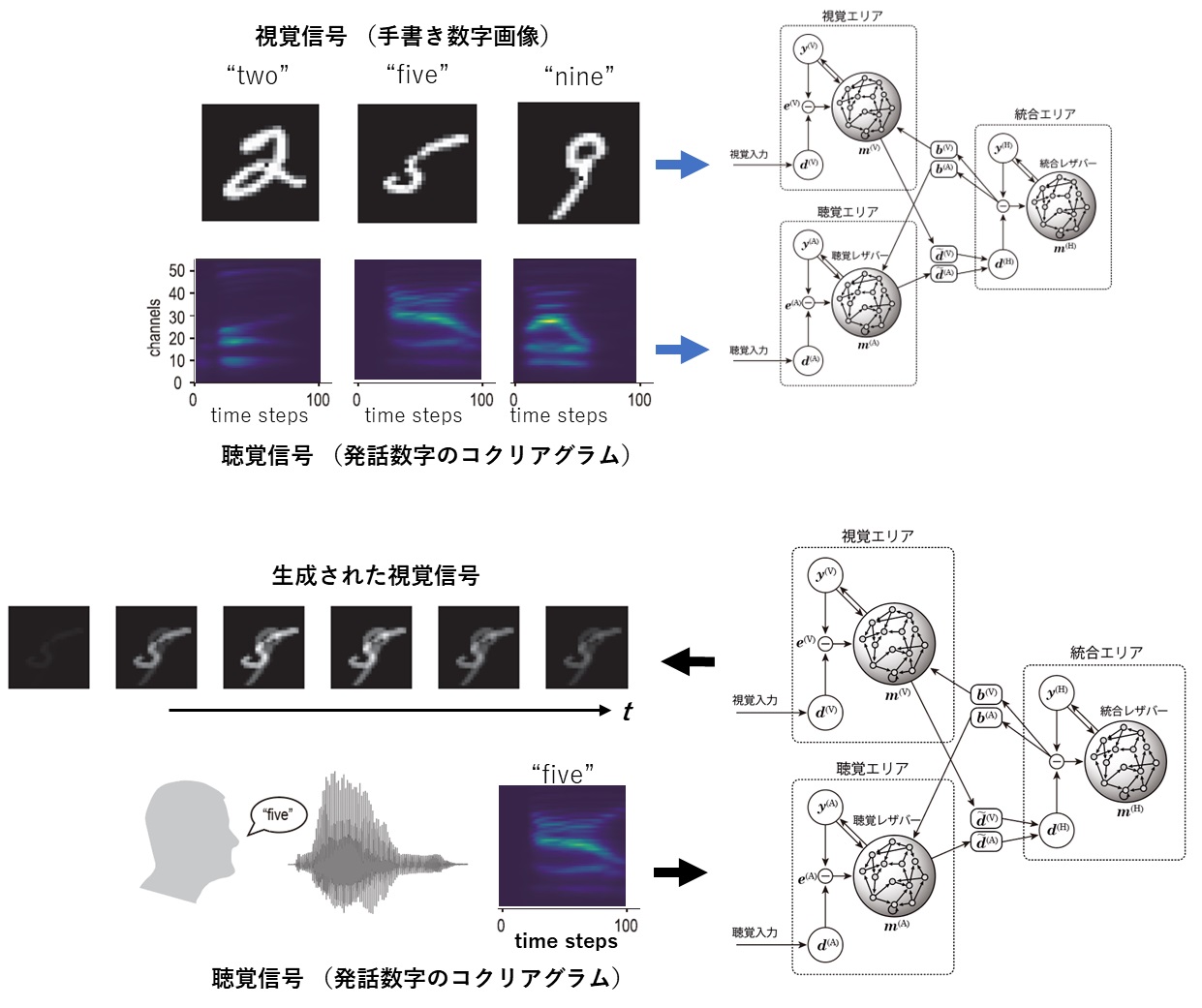
非線形素子である神経細胞の多数結合系において生じる複雑な神経ダイナミクスを活用した情報処理機構を基盤に、脳の予測符号化(predictive coding)や報酬修飾学習を組み込んだ感覚運動学習の統合情報処理モデルを構築する。
具体的計画
生物の脳・神経系データから得られる情報表現・神経ダイナミクスの知見を取り込んだ感覚運動学習モデルを構築し、運動制御における自発的神経活動の機能的役割や、神経変調物質(ドーパミン)を物質基盤とするオンライン報酬修飾学習の、学習効率と環境適応性を明らかにする。具体的には、再帰的ニューラルネットワーク(RNN)をベースとして、A03正水班、A03神谷班から得られる生物系の大規模神経活動データと、A01松井班の解析結果にデータ駆動モデリングを融合し、統合情報処理モデルを定式化する(下図)。その上で、A02山本班と連携し、統合情報処理モデルの生物学的妥当性を、バイオ素子(培養神経回路)上への実装を通じて検証する(①マルチセルラ数理モデル)。さらにA04河野班、A04平田班との連携の下で統合情報処理モデルを電子デバイス(ハードウェア)に実装し、センサ情報処理とアクチュエータ制御を含むロボット応用により、既存の適応制御モデルに対する優越性を明らかにする(②マルチセルラハードウェア)。
A01-2 大規模神経データ解析による視覚情報処理と学習則の抽出
代表松井 鉄平同志社大学 脳科学研究科 教授Researchmap
分担根東 覚東京大学 ニューロインテリジェンス国際研究機構 特任准教授Researchmap
協力李 鋭祥同志社大学 研究開発推進機構 特任研究員Researchmap
達成目標
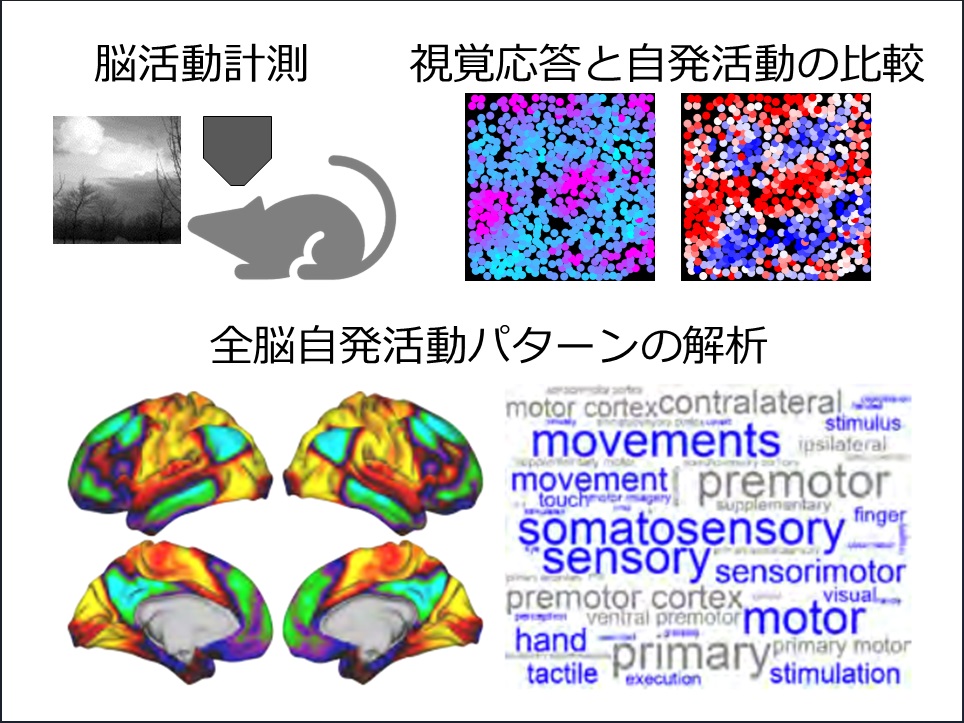
大脳皮質視覚野の自発活動に着目し、神経回路形成=学習における役割と視覚情報表現における機能を生物実験と統計学的データ解析により明らかにする。
具体的計画
本研究課題では自発活動をキーワードとして大規模脳活動データの数理的解析による研究および脳活動イメージングによる実験的研究を推進する。具体的には1)大脳皮質の自発活動が視覚情報処理に果たす機能的意義の解明とモデル化。2)数理モデルから予測される自発活動の機能と、実際の脳神経回路における自発活動パターンとの比較。3)シナプスレベルでの解析・モデル化による生体脳学習則の抽出を行う。A03神谷班との連携では、シナプスレベルの機能解析・携帯解析から発達・学習に伴う神経細胞間の局所相互作用の実態を明らかにする。A02山本班およびA04河野班との連携では、生体脳のデータ解析や実験から得られた結果を培養神経回路やハードウェアを用いたミニマルな系でモデル化する。
A01-3a 自発的シナプス可塑性によるcontinual learningの実現
代表栗川 知己公立はこだて未来大学 システム情報科学部 准教授Researchmap
達成目標
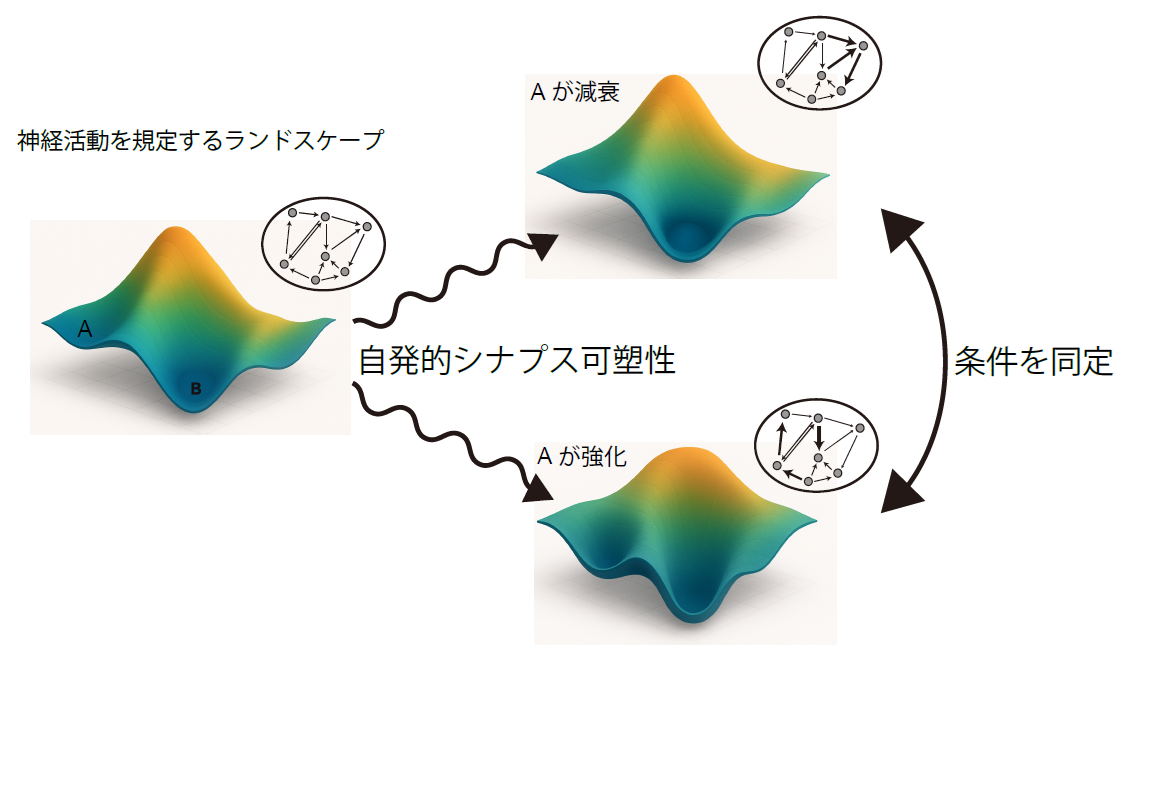
機械学習にはない自発的な神経活動およびシナプス可塑性に着目したcontinual learningを実現する。
具体的計画
神経系特有にみられる、課題遂行時以外の自発的な神経活動およびそれによるシナプス可塑性を用いて、過去の情報を保持したまま次の学習をおこなうcontinual learningを実現する。そのために、ニューラルネットワークモデルを用いて次の条件を明らかにする。1.ニューラルネットワークの活動に埋め込まれたパタンが、自発的な可塑性により強化される条件 2. 新たに学習するパタンが、迅速に埋め込まれる自発活動が満たす条件。 さらにこれらの条件を、培養系で検証可能な形で定式化する。
A01-3b 生物学的に妥当なリカレントニューラルネットワークを用いた最適状態表現の学習
代表森田 賢治東京大学 大学院教育学研究科(教育学部) 准教授Researchmap
達成目標
神経活動・結合に関する生物学的制約が、学習を妨げず逆に促進する可能性を、再帰的ネットワークにおける状態表現・価値の強化学習において明らかにしていくことを目的とする。
具体的計画
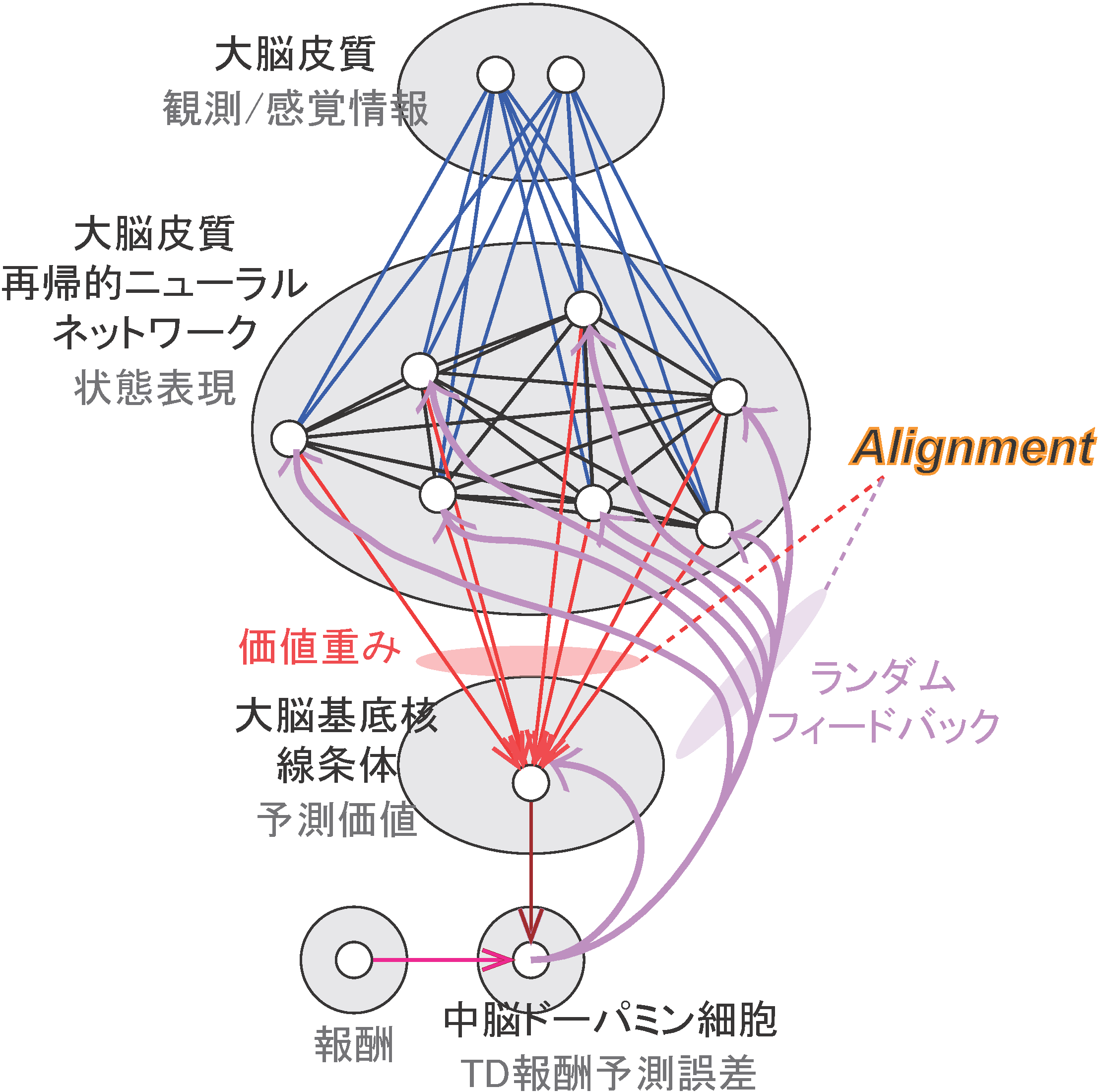
AI・機械学習で広く用いられる誤差逆伝播法は、生物学的制約ゆえに脳では実装され難いのではないかと長らく考えられてきたが、最近、それに近い方法が脳で実装されている可能性が活発に研究されている。本研究では、不確実性を含む環境において自らの「状態」の適切な表現を獲得し、価値の推定精度を高め、得られる価値を最大化するという学習において、生物学的制約が学習を促進する、新たな具体的可能性を、数理モデルを用いて明らかにしていく。大脳皮質-基底核-ドーパミン系の動作原理の解明と、その応用可能性の探索を目指していく。
A01-3c 身体・制御・環境結合力学系のリザバー計算による外乱を含む未知環境への適応
代表河合 祐司大阪大学 先導的学際研究機構 准教授Researchmap
達成目標
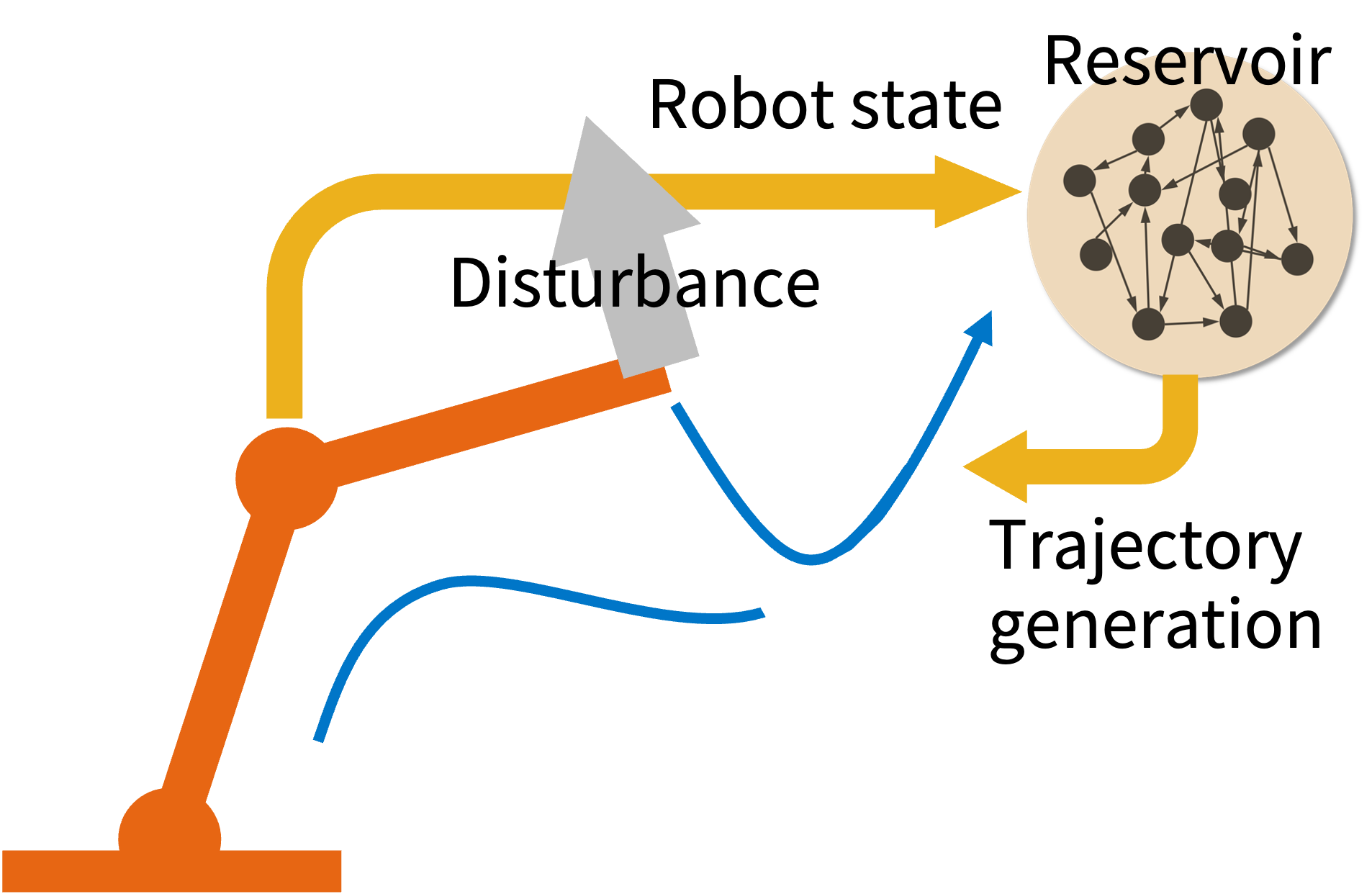
リザバー計算器が少数のターゲット軌道サンプルから身体・制御・環境の結合力学系としてのロボットの状態ベクトル場を学習し、各時刻でその場に沿った目標軌道を適応的に生成するモデルを提案し、外乱のある環境においてもロバストなロボット制御が可能であることを実証する。
具体的計画
リザバー計算を用いて適応的に参照軌道を生成するシステムを多リンクロボットのシミュレーションおよび実機に実装する。このときのロボットの状態を関節角度とし、外乱や観測ノイズ、環境(重力方向など)の変化を加えたときの操作量や挙動を評価する。従来の固定的な目標軌道が与えられる場合のフィードバック制御系と比較し、外乱に対する生成トルク量の少なさや復帰の速さなどについて提案手法の有意性を明らかにする。また、リザバー計算が複数の目標動作(例えば、周期運動と到達運動)を学習可能かを検証する。
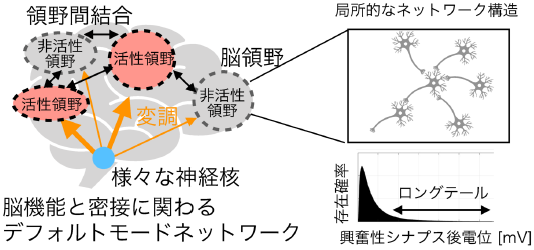
A01-3d バイオ超越への応用を目指した大規模脳波データに基づくヒトの脳機能創発機構の解明
代表信川 創千葉工業大学 情報変革科学部 教授Researchmap
達成目標
スパイキングニューラルネットワーク(SNN)とリザバーコンピューティング(RC)の枠組みを利用することで、本申請課題ではヒトの脳波から、脳機能の発現に関する神経ネットワークの構造的なパラメータ・ダイナミクス特性を同定することを目標とする。
具体的計画
①国内多施設臨床脳波コンソーシアムを中心に、これまでに蓄積された脳波データに対して、ダイナミクスの解析を行い、健常者と精神疾患を分離する特徴量を同定する。②SNNによるシミュレーションを行い、各神経活動のダイナミクスの特徴量を再現する神経ネットワークのパラメータ領域を探索する。③健常者と精神疾患の神経ネットワーク特性をRCの枠組みにより評価し、脳の機能性を支える神経ネットワークの構造とダイナミクス特性を明らかにする。