文部科学省 科学研究費助成事業 「学術変革領域研究(A)」


生体工学班(A02)
A02-1 生物規範的情報処理モデルの実細胞実装とウェットウェア計算機展開
達成目標
培養細胞を用いて形成した人工神経細胞回路に対するフィードバック制御系を構築し、脳型機械学習の物理基盤をボトムアップに解析する。
具体的計画
本研究では、人工神経細胞回路(※マイクロ流体デバイスなどを用いて回路構造が制御された培養神経回路)に対するフィードバック制御系を構築し、A01香取らが提案する動的予測符号化モデルの生物学的妥当性をボトムアップ的に検証する。これを通じて、A01松井班との協力のもとで、生物の脳で見られる自発活動の機能的意義を明らかにする(①マルチセルラ数理モデル)。研究期間後半には、報酬修飾学習の実細胞検証へと研究を進め、化学エネルギーで駆動される「ウェットウェア」の実現に向けた基盤技術を創成する(③マルチセルラウェットウェア)。

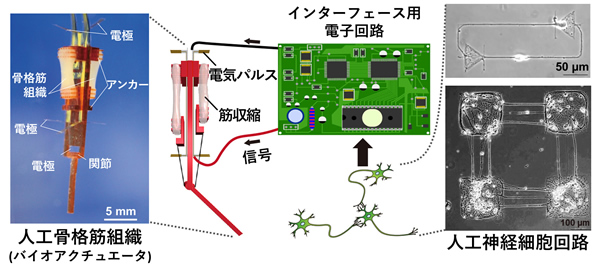
A02-2 多細胞神経ネットワークのインターフェース制御
達成目標
多次元の環境情報に基づいて人工神経細胞回路に対する刺激入力をリアルタイムで生成し、さらにそこで生じる活動電位(パルス信号)の時空間ダイナミクスに応答して人工骨格筋組織(バイオアクチュエータ)を駆動するインターフェース技術を構築する。
具体的計画
本計画班は、文部科学省ARIMのリソースを活用して、共用機器の活用等によるデータ取得からデータ構造化まで支援し、公募研究も含めた領域全体で利活用可能なプラットフォーム整備のミッションも担当する。
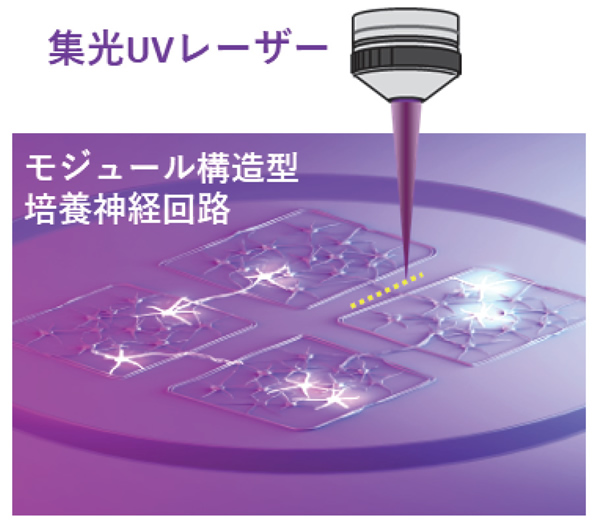
A02-3 人工神経細胞回路に基づく医工学ウェットウェアの創成
達成目標
微細加工技術を用いて構造を制御した人工神経細胞回路を用いて,大脳皮質神経回路の損傷耐性や修復特性,さらには薬理作用をボトムアップ的に解析し,新規な医工学ウェットウェアデバイスとしての有用性を証明する。
具体的計画
損傷耐性と自己修復性は、情報処理システムとしての脳のもっとも重要な特徴である。本計画班では、はじめに、集光したナノ秒パルスUVレーザーを用いて、大脳皮質運動野の実細胞モデルであるモジュール構造型人工神経細胞回路の接続部を切断する光学系を構築する。蛍光カルシウムイメージングにより計測した多細胞ダイナミクスのデータ解析はA01松井班と共同で進め、A03正水班の動物実験のデータと突合することにより、大脳皮質神経回路の損傷耐性と自己修復性について解析する。また、人工神経細胞回路に対する薬理作用をボトムアップ的に評価・解析し、化学変調疾患のモデリングを目指す。これらを通じて、神経細胞ネットワークの損傷耐性と自己修復特性を、回路構造(規模、モジュール性、切断部位など)や薬剤感受性の観点から系統的に明らかにする(マルチセルラ数理モデル)。研究期間後半には、領域内のヒト由来神経細胞の培養技術と連携し、疾患モデリングと新薬評価系の観点から人工神経細胞回路のマルチセルラウェットウェアとしての有用性を医工学分野で提示する。
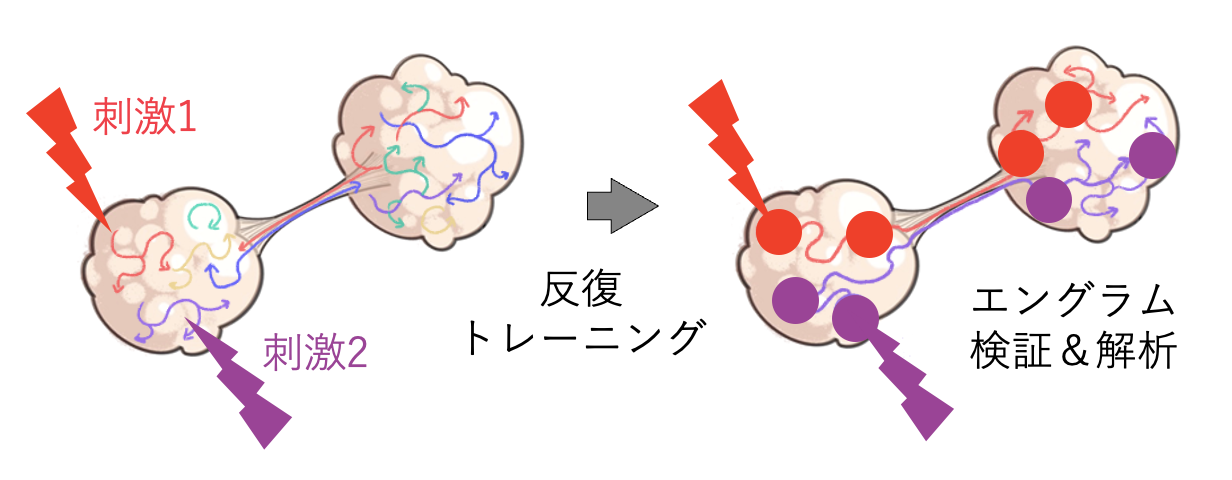
A02-4a オルガノイド神経回路組織におけるエングラム細胞ネットワークの確立と評価
代表池内 与志穂東京大学 生産技術研究所 教授Researchmap
達成目標
脳オルガノイドを接続した回路組織の内部にエングラム細胞ネットワークを創出する。
具体的計画
大脳オルガノイドを接続し、回路組織を構築する。時空間的に異なる入力刺激に対して異なる出力応答を生み出すように、トレーニングを行う。入出力対応関係を確立した上で、異なる入力刺激に対して特異的に応答する細胞集団をエングラムネットワークととらえ、これを同定する。
A02-4b 全脳摘出標本を用いたメモリーリプレイの仕組み解明
代表乘本 裕明名古屋大学 理学研究科 教授Researchmap
達成目標
視覚経験が脳内回路に記憶として定着する神経メカニズムを解明する。
具体的計画
爬虫類の眼球-全脳標本を用いて大脳皮質や海馬の視覚応答を網羅的に記録する。応答したニューロン群がその後自発的にリプレイされるかどうかを確かめ、リプレイに関与するニューロン間の可塑的変化をリアルタイムで捉える。

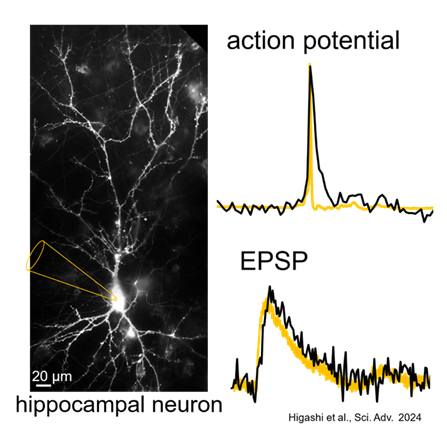
A02-4c 光でつなぐ培養神経回路の適応的情報処理
代表川口 真也京都大学 理学研究科 教授Researchmap
達成目標
神経系の学習能力を動物個体から切り離した培養皿に‘つくる’ことを目指し、神経細胞集団とリアルタイムで情報をやり取りするための光技術を確立する
具体的計画
細胞膜電位の蛍光イメージングと精緻な電気生理学を駆使し、神経細胞の活動を非侵襲的にリアルタイム記録する。その情報の演算結果を回路に電気刺激や光活性化分子を用いた刺激でフィードバックする系をつくる。さらに、シナプスおよび細胞の機能的可塑性を光操作によって誘導・可視化して、培養神経ネットワークの柔軟な情報処理変化の基盤となるシナプス・細胞レベルの可塑性の実像を空間解析する。
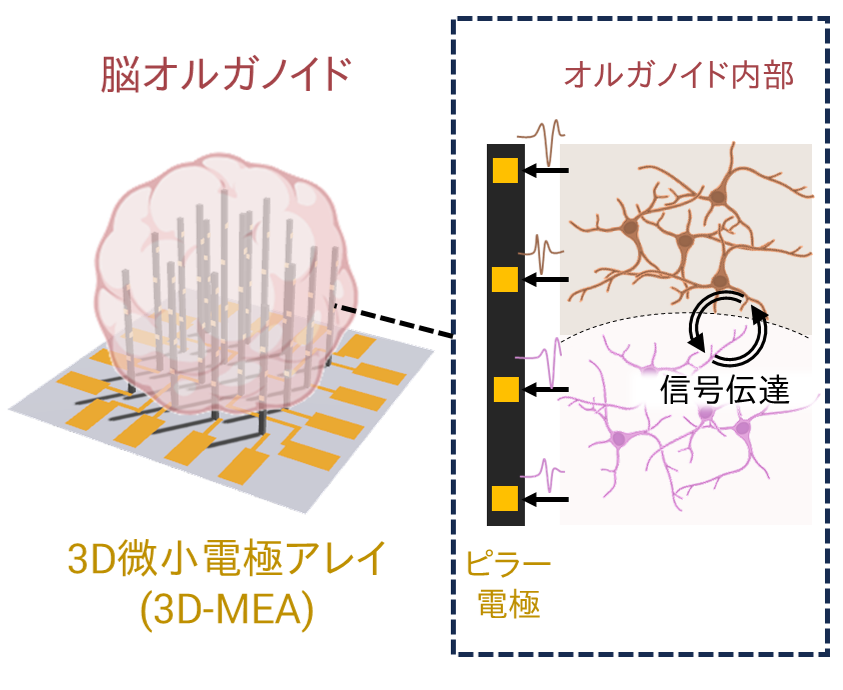
A02-4d 脳オルガノイド内部の時空間発火伝達を計測する3Dピラー電極アレイ
代表酒井 洸児日本電信電話株式会社NTT物性科学基礎研究所 多元マテリアル創造科学研究部 研究主任Researchmap
達成目標
より生体らしい人工神経回路網である脳オルガノイドの内部で発生している細胞間情報伝達の可視化に向けて、脳オルガノイド内部で神経発火を計測可能な3D微小電極アレイを開発する。
具体的計画
研究計画前半では、立体的な細胞培養組織の電気的計測に適したピラー型の微小電極アレイの作製方法および構造を明らかにし、神経スフェロイドの内部に留置した電極による自発発火計測を実証する。具体的には、3Dプリンタによる立体造形の空間解像度を活用し、従来のフォトリソグラフィでは困難な立体微細構造を微小電極アレイ上に作製することを目指す。研究計画後半では、作製した3D微小電極アレイ上に脳オルガノイドを作製し、複雑な培養組織構造に対応した神経発火の違いを可視化することでデバイス実証を目指す。
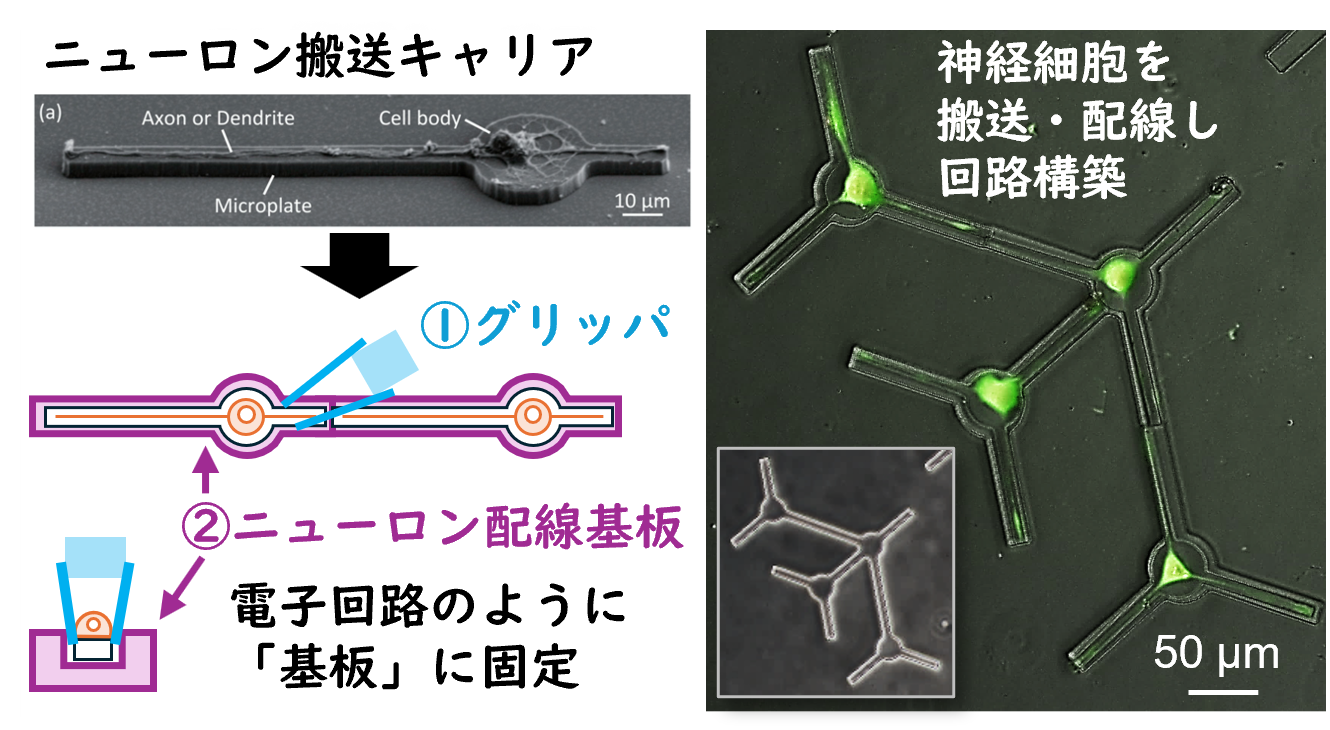
A02-4e バイオコンピュータ回路構築のための培養ニューロンの自在搬送・動的配線技術の開発
代表吉田 昭太郎中央大学 理工学部 助教Researchmap
達成目標
バイオコンピュータの創出に資する培養神経回路の設計・構築技術の確立を目指し、申請者の独自技術である「ニューロン搬送キャリア」を自在搬送・動的配線可能にする「自在搬送グリッパ」および「ニューロン配線基板」を開発する。
具体的計画
下記の二つについて実施する。 「自在搬送グリッパ」:単一神経細胞を搬送するキャリアを把持可能な、電気で伸縮可能な柔らかい有機高分子製のマイクログリッパの設計・構築法を開発し、マイクロマニピュレータによる精密位置制御と合わせた3D自在搬送を可能にする。 「ニューロン配線基板」:自在搬送グリッパによって搬送したキャリアを固定できる溝を有するマイクロデバイスの材質と構造について検討し、神経回路を安定して長期培養可能にする基板を開発する。
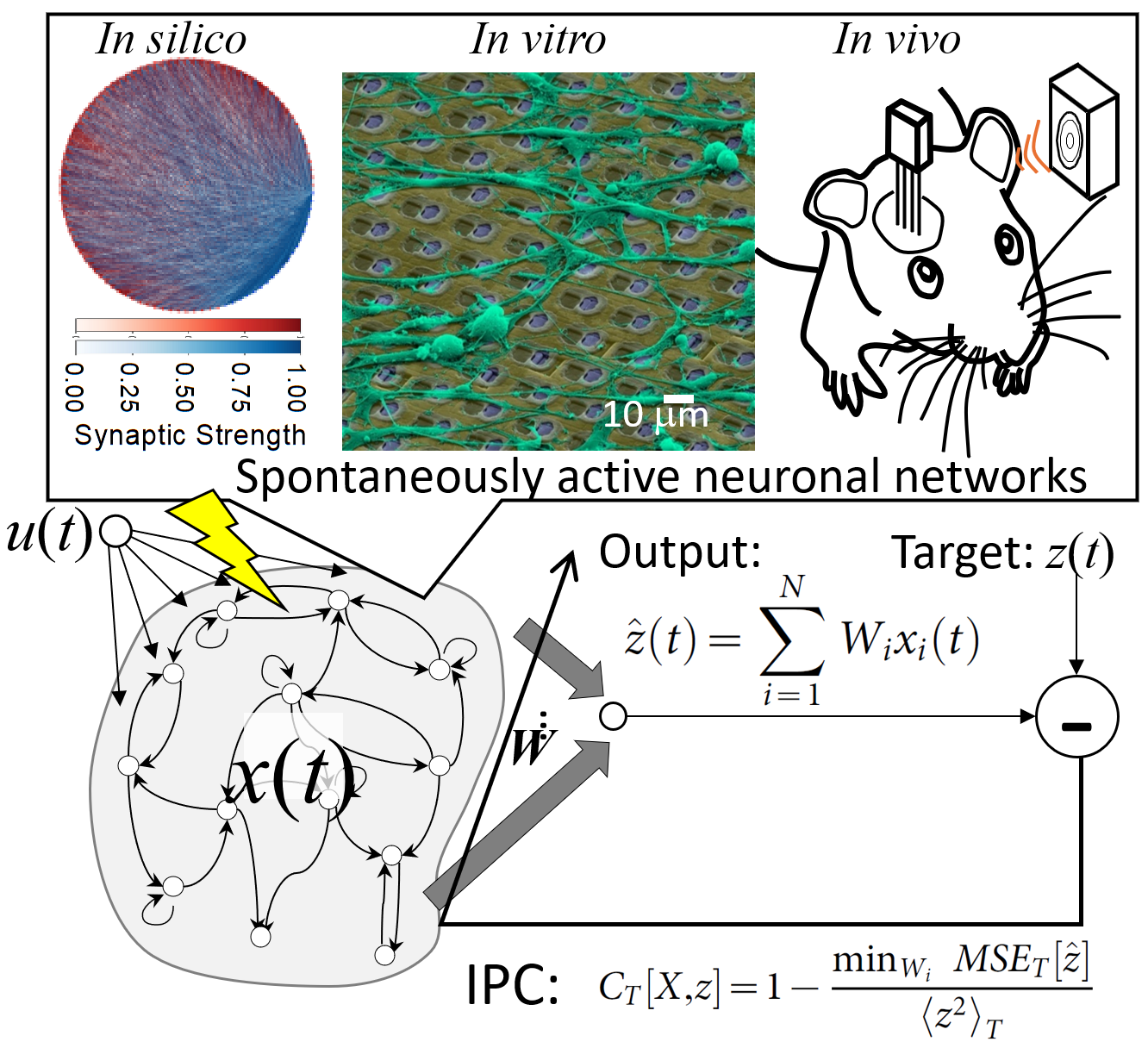
A02-4f 自発活動を生かした脳の臨界計算
代表高橋 宏知東京大学 大学院情報理工学系研究科 教授Researchmap
達成目標
脳の自発活動が、脳の臨界状態を維持し、情報処理能力を最適化することを作業仮説として提案し、検証する。
具体的計画
脳の「臨界計算」仮説とリザバー計算の理論に基づき、スパイキングニューラルネットワーク (SNN) のシミュレーション (in silico)、培養神経回路 (in vitro)とげっ歯類の感覚野 (in vivo)の生理実験を進める。本研究では、
(1) 自発活動する脳の情報処理容量 (IPC) の定量化手法を確立したうえで、
(2) 上記仮説に基づき、自発活動の機能的意義を検証し、
(3) 自発活動を調整することで神経回路の情報処理能力の向上を目指す。