文部科学省 科学研究費助成事業 「学術変革領域研究(A)」


システム神経科学班(A03)
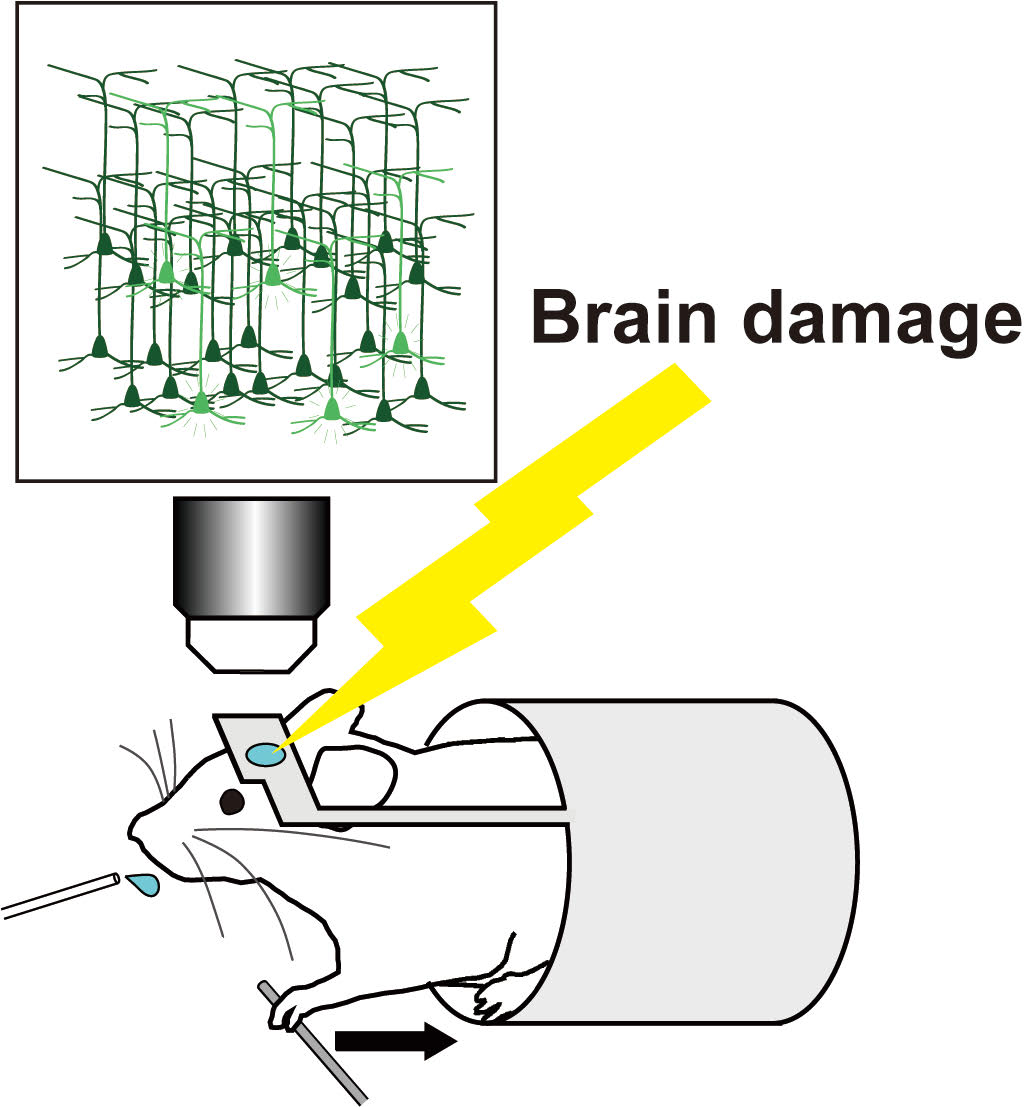
A03-1 モデル動物脳における運動制御の損傷耐性と修復特性
代表正水 芳人同志社大学 脳科学研究科 教授Researchmap
分担西村 周泰同志社大学 脳科学研究科 准教授Researchmap
分担尾崎 弘展同志社大学 脳科学研究科 准教授Researchmap
達成目標
脳損傷モデルの実験系とカルシウムイメージング法を用いて、モデル動物脳における損傷耐性と修復特性の神経基盤を明らかにする。
具体的計画
脳をバイオコンピューティングシステムとして扱った場合の特徴は、その損傷耐性と自己組織性にある。本研究課題では、大脳皮質運動野損傷モデルの実験系とin vivoカルシウムイメージングによるマルチセルラ(多細胞)ネットワークの時空間発火パターンの計測法を用いて、モデル動物脳における損傷耐性と修復特性の神経基盤を明らかにする。高次元時系列データの定量解析はA01松井班との連携の下で進め、さらにA01香取班との連携により汎用的なRNN(リカレントニューラルネットワーク)として記述するための各種パラメータを推定する。さらにA02山本班での自発活動計測や、A02平野班での損傷実験との比較対照を通じ、培養モデル系の脳らしさを定量評価、さらにはA02谷井班が開発するバイオアクチュエータの効率的な制御法の提案へと結びつける。
A03-2 多細胞神経ネットワークの学習と変調の神経回路基盤
達成目標
生体脳において、シナプス伝達などのサブスレッショルドの細胞間相互作用と活動電位の軸索伝播が、神経活動や神経修飾物質によって可塑的に変調され、多細胞神経ネットワークのダイナミクスを制御する生理学的メカニズムを明らかにする。
具体的計画
脳スライス標本と人工神経細胞回路を対象として、脳と分散培養系におけるシナプス可塑性(学習の神経基盤)の異同を電気生理計測により比較解析する。脳スライスの実験では、規則だった回路構造を有するマウス海馬の標本を用いる。人工神経細胞回路の評価では、 1つの再帰結合を有する単一細胞モデルと、時定数の異なる複数の再帰結合が入り組んだ多細胞ネットワークモデルの両者を作製し、海馬で見られるNMDA受容体依存性の可塑性機構が人工神経細胞回路で発現するための必要十分条件を明らかにする(下図)。さらに、A01松井班との連携により、これまで個別に研究が進められてきた海馬と大脳皮質の可塑性の相違点も系統立てて比較解析する。研究期間後半には、報酬信号として知られる神経変調物質(ドーパミン)や神経支持細胞であるグリア細胞による変調機構を解析・モデル化し(①マルチセルラ数理モデル)、人工神経細胞回路をウェットウェア計算機(A02山本班)として応用した際の可塑性制御法を提案する。加えて、多細胞ネットワークの同期性を強く制御する軸索の活動電位の伝導時間について、そのゆらぎの分子機構(軸索カリウムチャンネルの活動依存的な調節)や、同期リズム形成に及ぼす影響を、A01香取班と連携して実験と理論の両面から明らかにする。
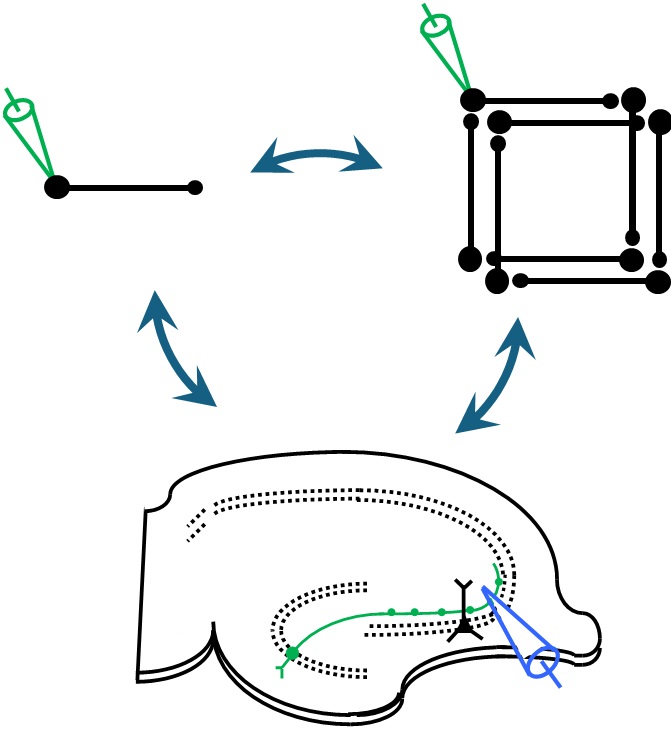
学習則の抽出
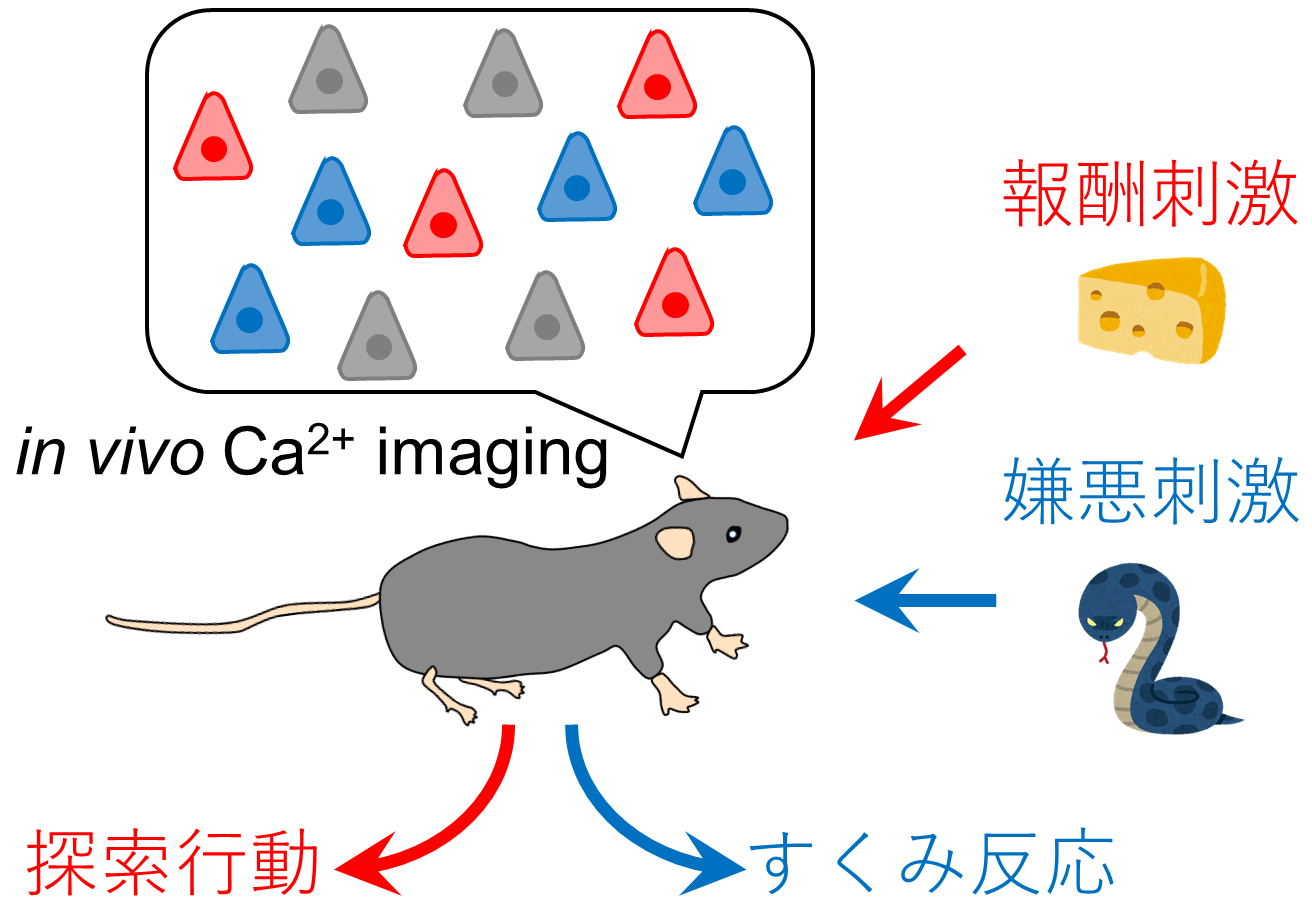
A03-3a 葛藤下での行動選択のマルチセルラメカニズム解明
代表人羅 菜津子(今村 菜津子)熊本大学 大学院生命科学研究部(薬) 講師Researchmap
達成目標
多様な入力が細胞集団の活動と行動出力を決定する神経基盤の解明
具体的計画
生物が周囲の環境に適応し生存するためには、適切な意思決定とそれに基づく行動出力が必要不可欠である。特に、報酬刺激と嫌悪刺激が同時に存在するような葛藤環境では、報酬刺激に対して探索行動を引き起こす経路や、嫌悪刺激に対してすくみ反応を引き起こす経路など、異なる行動出力に繋がる経路が同時に活性化していると考えられるが、それらの情報が演算され適切な行動を選択するメカニズムは不明である。本研究では、in vivo カルシウムイメージング法や光遺伝学的手法といった、リアルタイム神経活動記録・操作法を駆使することにより、これらの異なる経路からの入力がどのようにして神経細胞集団の活動を決定し、最終的な行動選択に至るのかを解明する。
A03-3b マルチセルラネットワークによる頑健かつ柔軟な味覚情報処理の解明
代表相馬 祥吾京都府立医科大学 医学(系)研究科(研究院) 助教Researchmap
達成目標
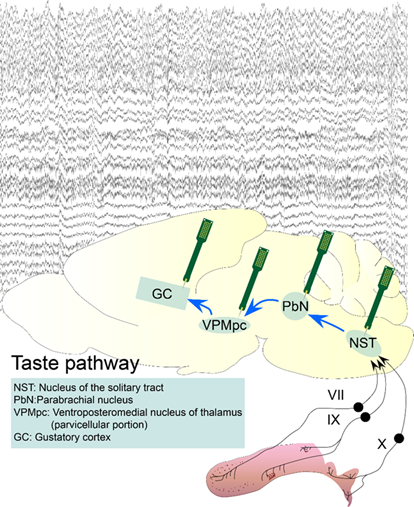
マルチオプトタグ多細胞発火記録法を用いて、末梢から中枢に至るマルチセルラネットワークによる味覚情報処理の基本原理を解明する。
具体的計画
視覚伝導路は、錐体細胞と杆体細胞からの信号を統合し、視覚体験を生み出す。一方、味覚伝導路は、五つの基本味を受容する味細胞からの信号を処理して味覚体験を形成するが、その情報処理の仕組みは未解明である。本研究では、大規模電気生理学記録を用いて、中枢における味覚情報処理の基本原理を解明する。さらに、A01班との連携を通じて、視覚系とは異なる味覚系特有の情報処理様式を探り、新たな数理モデルの確立に挑戦する。
A03-3c 運動障害後に起きるホメオスタシスな神経回路網再編成機構について
代表森島 美絵子同志社大学 研究開発推進機構 准教授Researchmap
達成目標
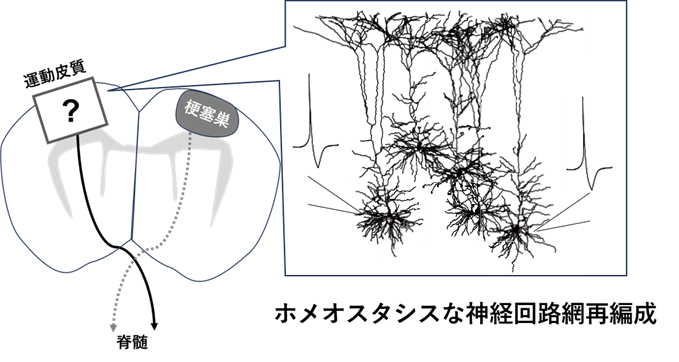
脳梗塞後の一連の活動変化によって引き起こされるホメオスタシスな神経回路網再編成について細胞、シナプスレベルで明らかにする。
具体的計画
運動制御時には、運動に関連した大脳皮質内の局所回路、及び皮質下領域回路のマルチセルラ系による神経活動パターンが協調して運動指令をコードする。脳梗塞によってこれらの活動が破綻したとき、どのような再編成が起こるのかについてほとんどわかってない。そこで、本研究課題で電気生理学的に脳スライス標本を用いて運動制御に関わる神経回路網再編成について明らかにする。
A03-3d 多種マルチセルラネットワークの相互作用による認知地図生成の機構
代表北西 卓磨東京大学 大学院総合文化研究科 准教授Researchmap
達成目標
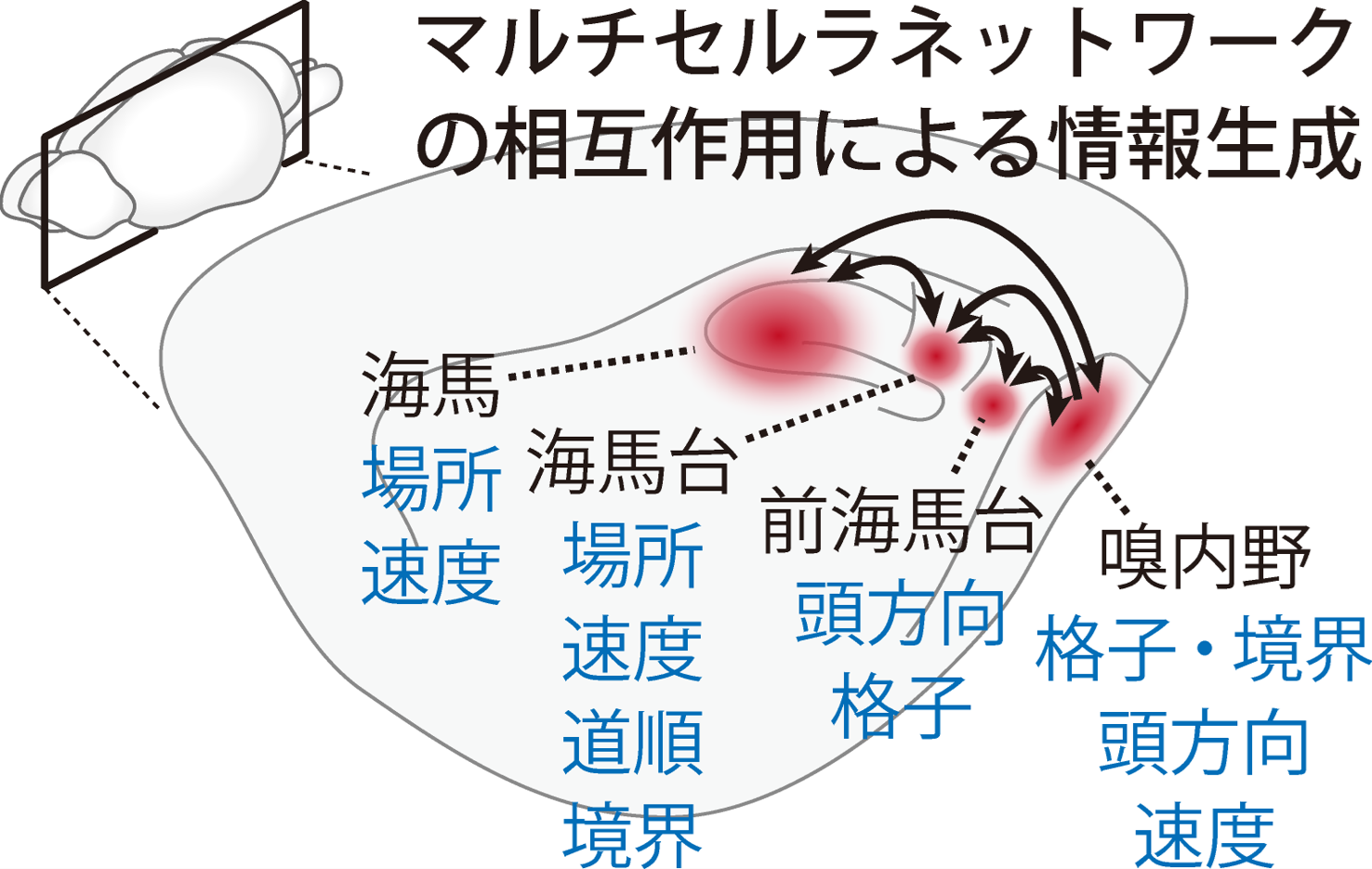
マルチセルラネットワークの相互作用による空間情報の生成機構の解明
具体的計画
空間認識の脳基盤は、空間情報をコードする多彩な神経細胞群だと考えられている。しかし、どの細胞群からどの細胞群への神経伝達によりどの空間情報が生成されるかという、情報の生成機構の実態は不明瞭である。本研究は、空間探索をおこなうげっ歯類を対象に、海馬体-嗅内野の広域にわたる多細胞電気生理計測や光操作を行うことで、空間情報の生成機構を解明する。
A03-3e 多感覚統合を実現する再帰型神経回路の検証とモデル化
代表船水 章大東京大学 定量生命科学研究所 講師Researchmap
達成目標
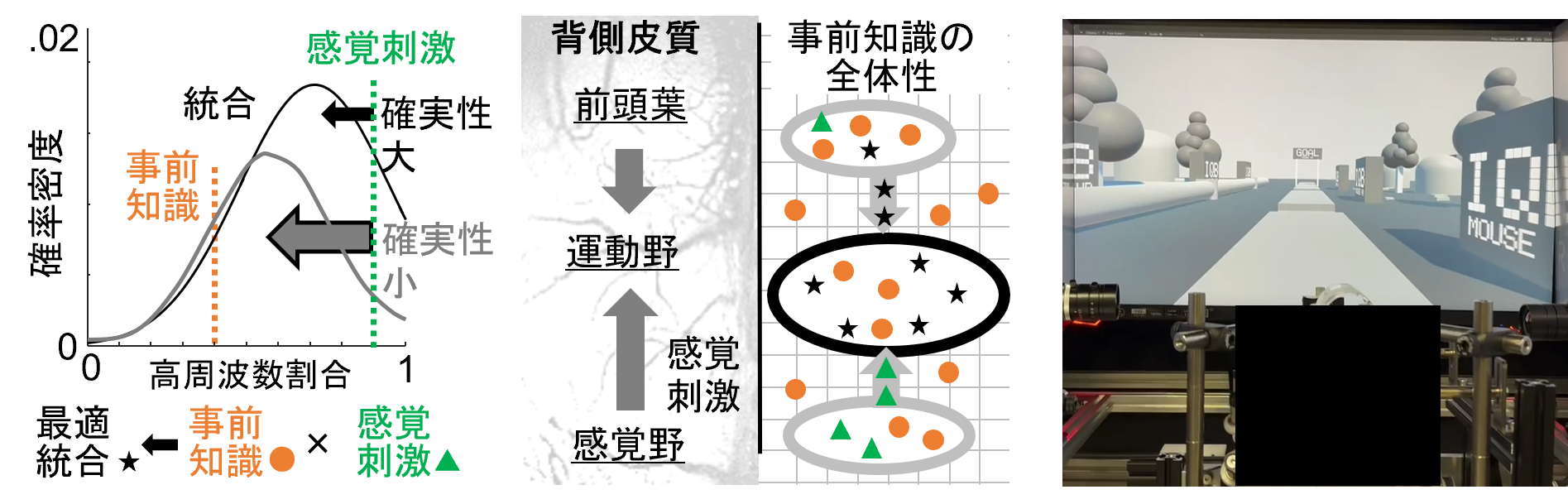
脳の多感覚統合とベイズ推定の関係を、理論と実験の融合研究で解明する。
具体的計画
ベイズ推定に基づくマウスの多感覚行動課題を構築し、課題中のマウスの神経活動を多細胞同時計測する。行動課題時のマウスの身体運動をAIでモデル化し、AIの人工素子とマウスの神経細胞の活動を比較する。これらの知見を、脳の意思決定機構の解明だけでなく、脳型AI開発に応用する。
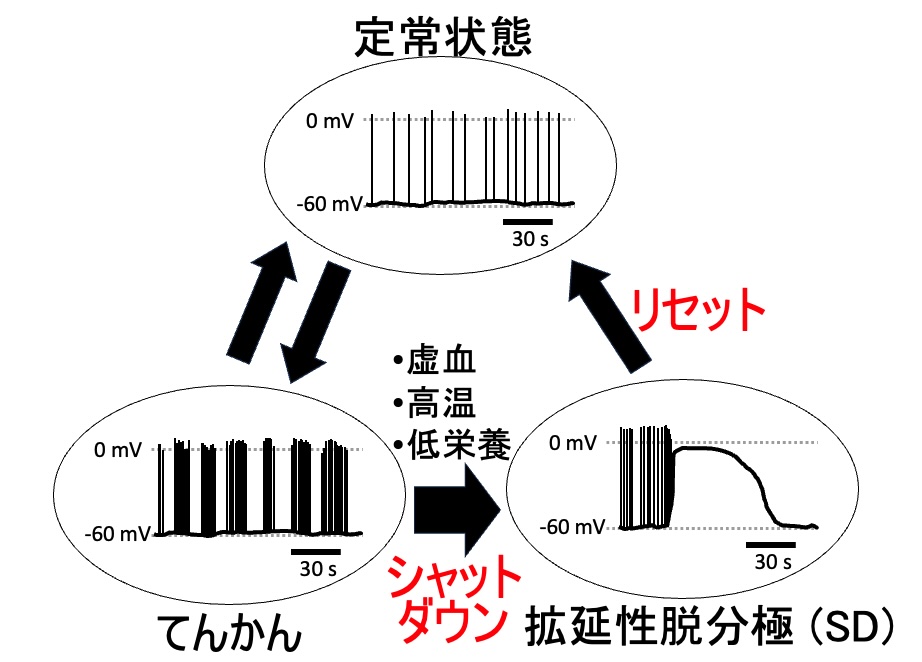
A03-3f 拡延性脱分極による種を超えた神経系リセット機溝の解明
代表相澤 秀紀広島大学 医系科学研究科(医) 教授Researchmap
達成目標
神経リセット機構として拡延性脱分極における神経細胞ーグリアの相互作用を明らかにする。
具体的計画
機能障害を引き起こした神経系のリセット機構を通じて、神経系の情報処理機構の理解に挑む。具体的には薬剤誘導性のてんかん活動を示すマウスやゼブラフィッシュ脳に対して拡延性脱分極(SD)を引き起こす実験系を構築する。本実験系を用いて、神経リセット機構としてのSDにおける神経細胞およびグリア細胞の役割を電気生理学およびカルシウムイメージングにより明らかにする。